Gelenkknoten

Gelenkknoten für Raumfahrtroboter
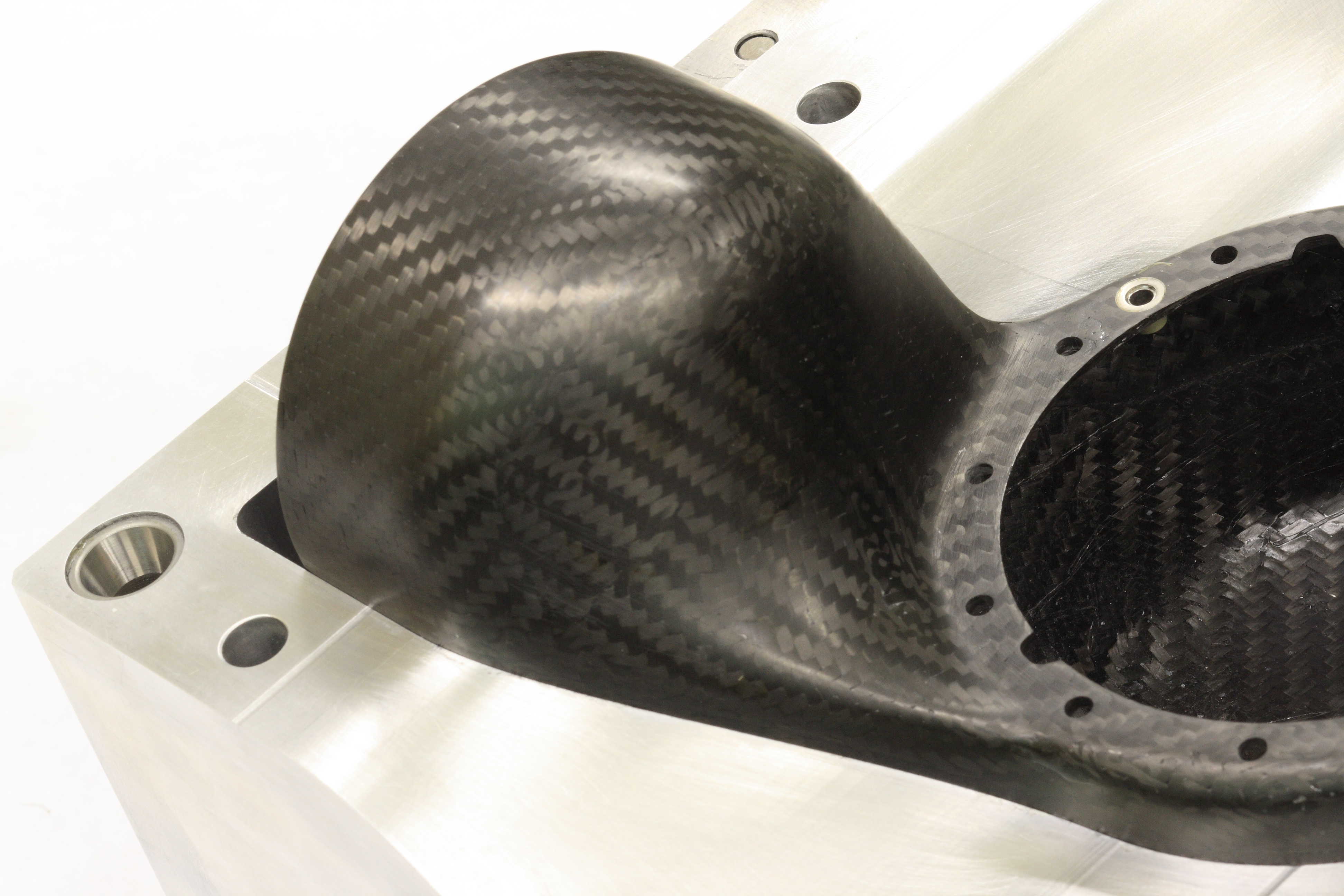
Bei der Entwicklung eines Gelenkknotens für eine Raumfahrtanwendung lag die besondere Herausforderung in der Definition und Realisierung einer komplexen, mehrfach gekrümmten 3D-Geometrie. Sieben derartige Gelenkknoten werden zu einem Roboterarm assembliert, wobei der Roboter insgesamt über drei Arme verfügt. Aufgabe des Roboters ist es, an der Internationalen Raumstation (ISS) Ausseneinsätze vorzunehmen und somit das Risiko, welches sich durch menschliche Ausseneinsätze ergibt, zu verringern.
Die komplexe Geometrie der einzelnen Knoten ergibt sich u.a. aus der Forderung, dass der Roboter beim Start auf einer Ariane5-Trägerrakete über einen beschränkten Platz verfügt und sich entsprechend maximal zusammenfalten muss. Für die Herstellung wurde ein autoklavfreier Aushärteprozess mit einer Aluminium-Negativform und einem Innendrucksack gewählt und optimiert, wobei ein hochmoduliges CF-Prepreg verwendet wurde. Die statischen Tests konnten darlegen, dass die festgelegte Auslegung die Anforderungen an Steifigkeit und Festigkeit erfüllt und gleichzeitig das Gewicht im Vergleich zur Aluminiumlösung auf rund 40% reduziert werden konnte